Map Configuration
Accurate maps can significantly improve the efficiency of subsequent deployments and positioning accuracy, so this should be given priority.
- Ensure that the map matches the actual environment
- To ensure the map is the correct size, measure its length and width in several places and compare those measurements with the dimensions shown on the map.
- Ensure that the coordinate mapping of the map is accurate after it is loaded into the software
- For scenarios involving multiple maps, ensure that the relative positions of the different maps are correct. Since they are spatially close, surrounding beacons will receive signals; if the relative positions of the maps are incorrect, it is equivalent to incorrect beacon coordinates, which could severely affect positioning. For example, in a building where multiple floors correspond to multiple maps, the origin and elevation of each map must correspond to reality. For instance, if the floor-to-floor height is 5 meters, then the 1st floor is 0 meters, the 2nd floor is 5 meters, and the 3rd floor is 10 meters....
- For buildings or maps that are already quite far apart, their relative positions can be disregarded; they can be treated as independent positioning systems that do not affect one another.
Single-Map Configuration
- Click 【Map Management】 on the left, add a map, select the map file, and set the name and elevation.
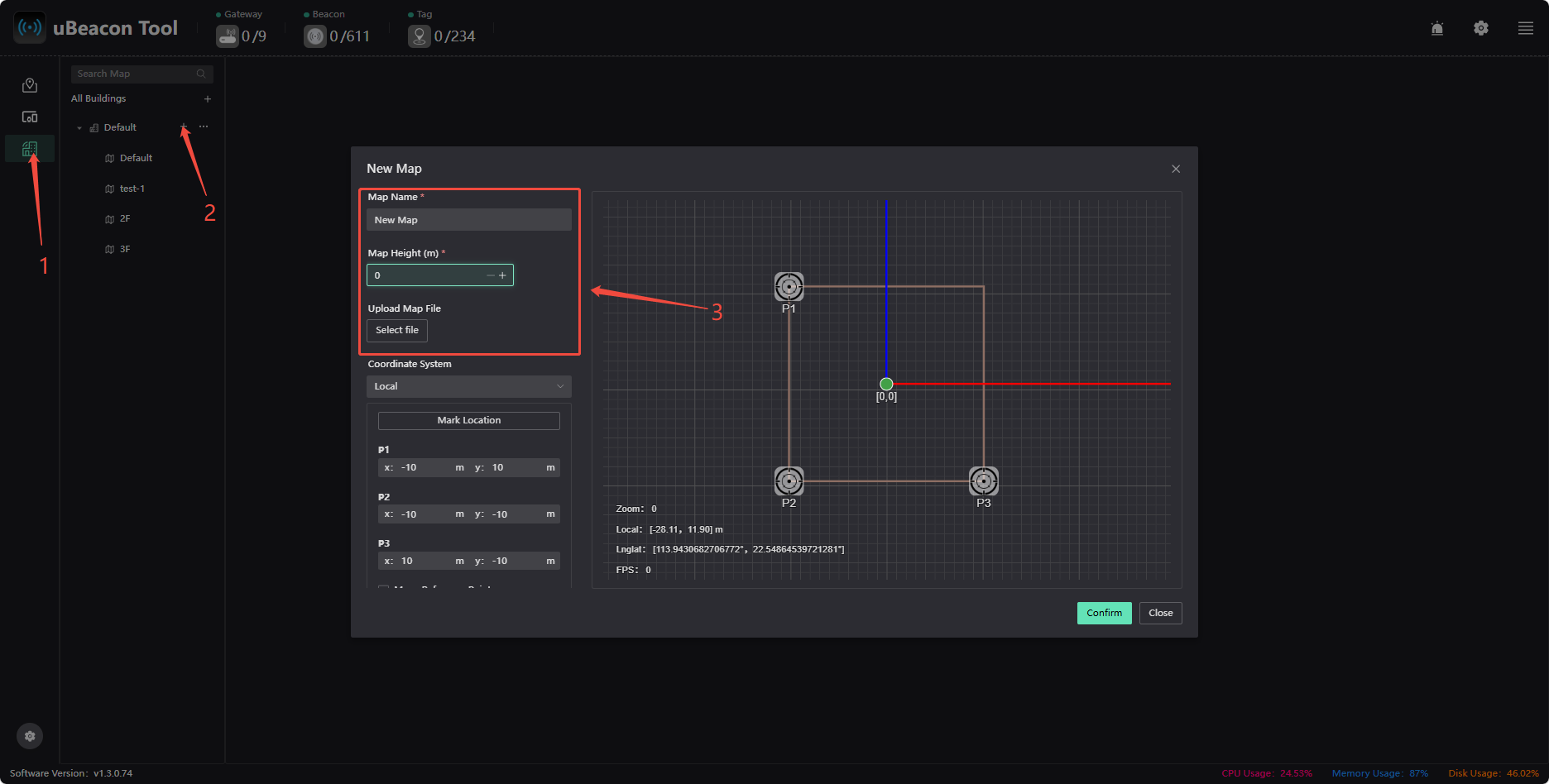
2.Select the newly added map, which has three reference points: P1, P2, and P3. You need to configure the actual corresponding locations of these three reference points to implement the map coordinate mapping.
(1) Check the 【Move Reference Points】 box, then drag the three reference points to the building feature points. These points should be easily accessible for determining actual distances (e.g., through on-site measurements or distances known from CAD drawings).
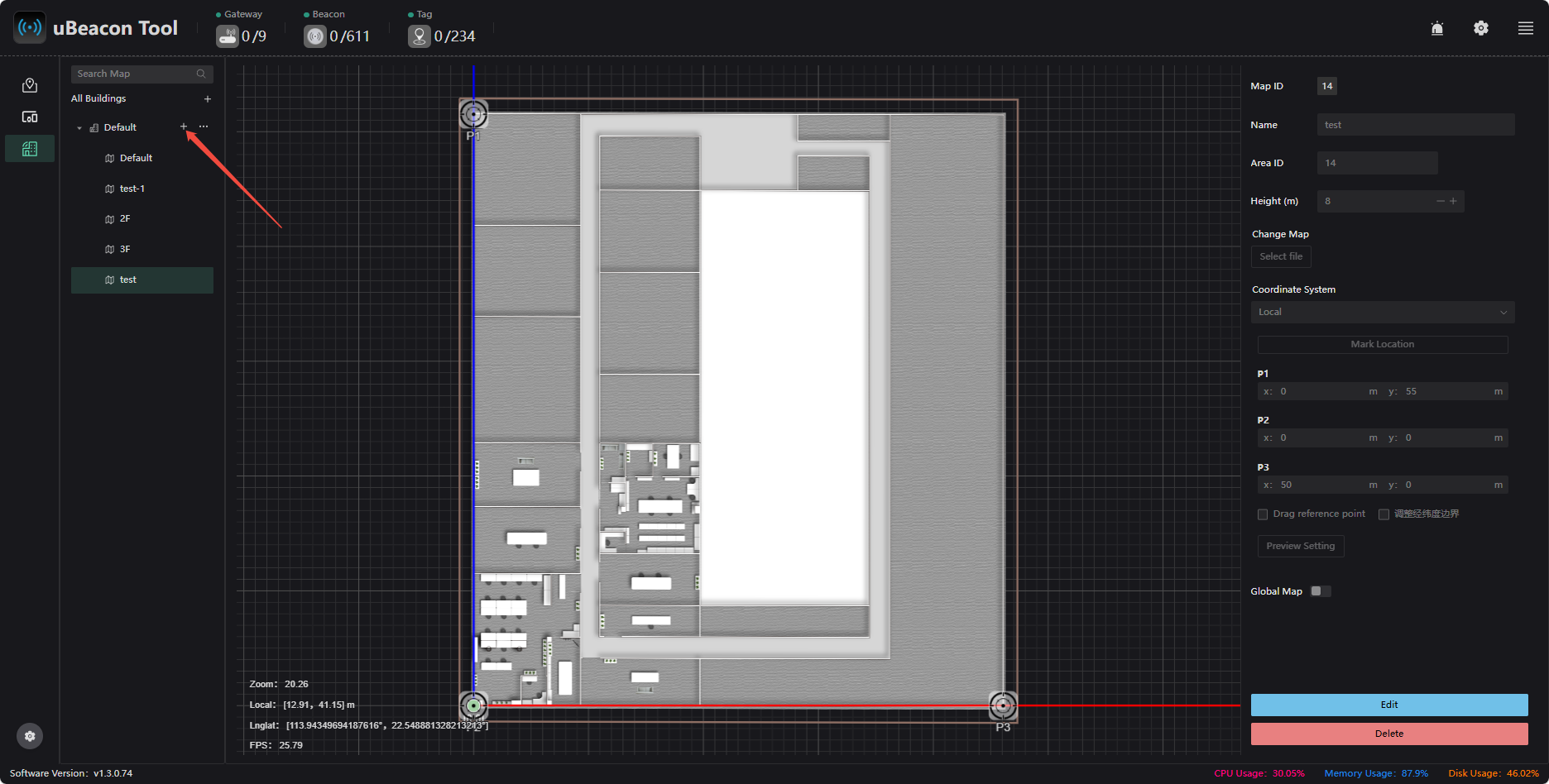
(2) In the figure, P2 is used as the coordinate origin, with P1 placed in the upper-left corner and P3 in the lower-right corner. Given that the actual distance between P2 and P1 is 55 m and the actual distance between P2 and P3 is 50 m, set the coordinates as follows: P1(0, 55), P2(0, 0), P3(50, 0)
(3) After correctly entering the coordinates of the three reference points, the map’s aspect ratio is automatically determined (provided that the imported map was drawn accurately and the reference point coordinates were entered correctly), thereby enabling coordinate mapping for the entire map.

Multi-Story Map Configuration
Continue by clicking “Add New Map,” select the map files for the different floors, and add and configure them accordingly.
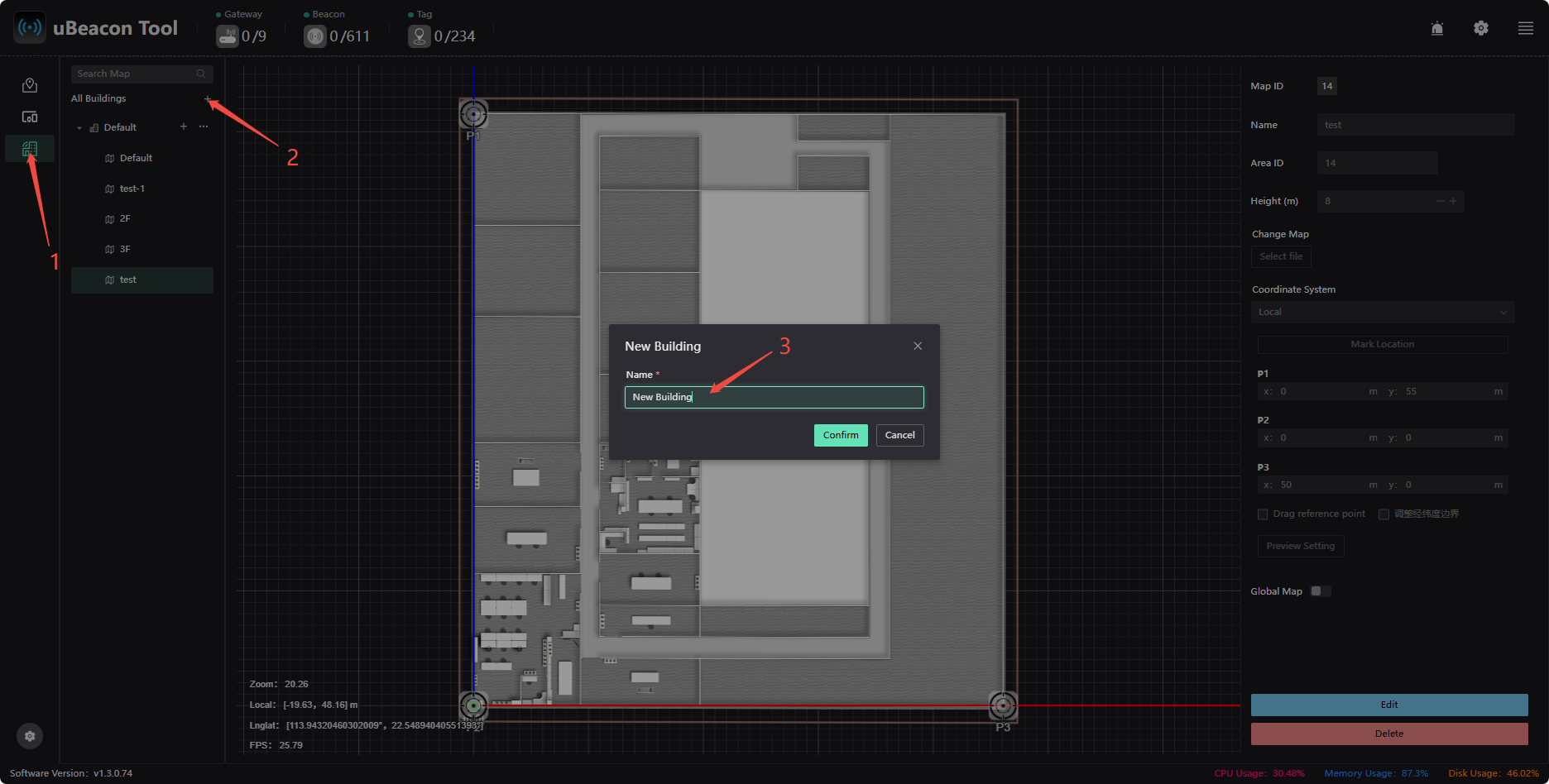
Multi-Building Map Configuration
Click 【Map Management】 > 【All Buildings】, then click the 【Add Building】 button to add a new building. For specific instructions on adding the building to a map, refer to Single Map Configuration
Map Configuration Example
1.Add a map:
Click 【Map Management】 on the left, click 【Add Map】, enter a map name, configure the map's actual height above ground level, and import the map file (jpg or png).
2.Configure Reference Point Coordinates:
As shown in the figure below: With P2 as the origin, P1 is located at the top-left corner of the map, and P3 is located at the bottom-right corner of the map. The actual distance between P2 and P1 is 55 m. and the actual distance from P2 to P3 is 50 m. Set P1 to (0, 55), P2 to (0, 0), and P3 to (50, 0). Once the coordinates of these three reference points have been correctly entered, the map’s aspect ratio will be set correctly (provided that the imported map is accurate and the reference point coordinates are correct), enabling coordinate mapping for the entire map.
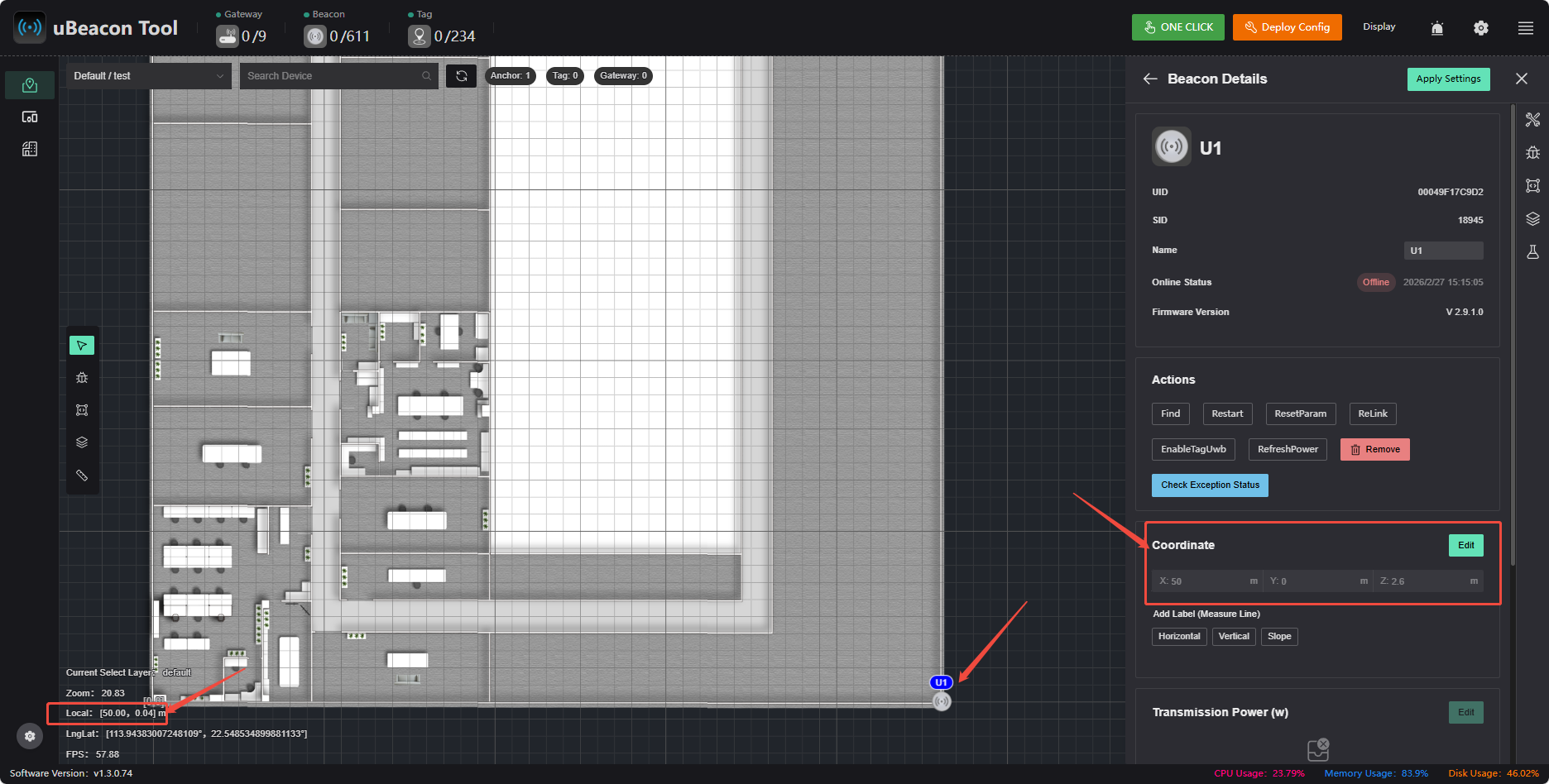
3.Verify that the map scale is correct:
Method 1: Using Known Reference Points/Beacons
Example: If beacon U1 is placed at position P3, the coordinates for U1 should be displayed as (50, 0). If this is correct, it indicates that the mapping is accurate, and the coordinates for other buildings will also be accurate.
Method 2: Verification Using Random Point Coordinates
Click anywhere on the map to select a specific feature point on a building, note its coordinates, and then compare them with the distance from that point to the origin as determined from CAD drawings or on-site measurements.
Method 3: Verification of the Distance Between Two Known Points
Record the coordinates of two architectural feature points on the map, calculate the distance between them, and compare it with the distance shown on the CAD drawing or the measured distance.
⚠️ Note
The above verification is meaningful only if the map is accurately drawn and the coordinates of the reference points are entered correctly.
Once you have confirmed that the mapping is correct, you can use the Coordinate Measurement Method to quickly and manually obtain the coordinates of other beacons.
Latitude and Longitude Settings and Coordinate Conversion
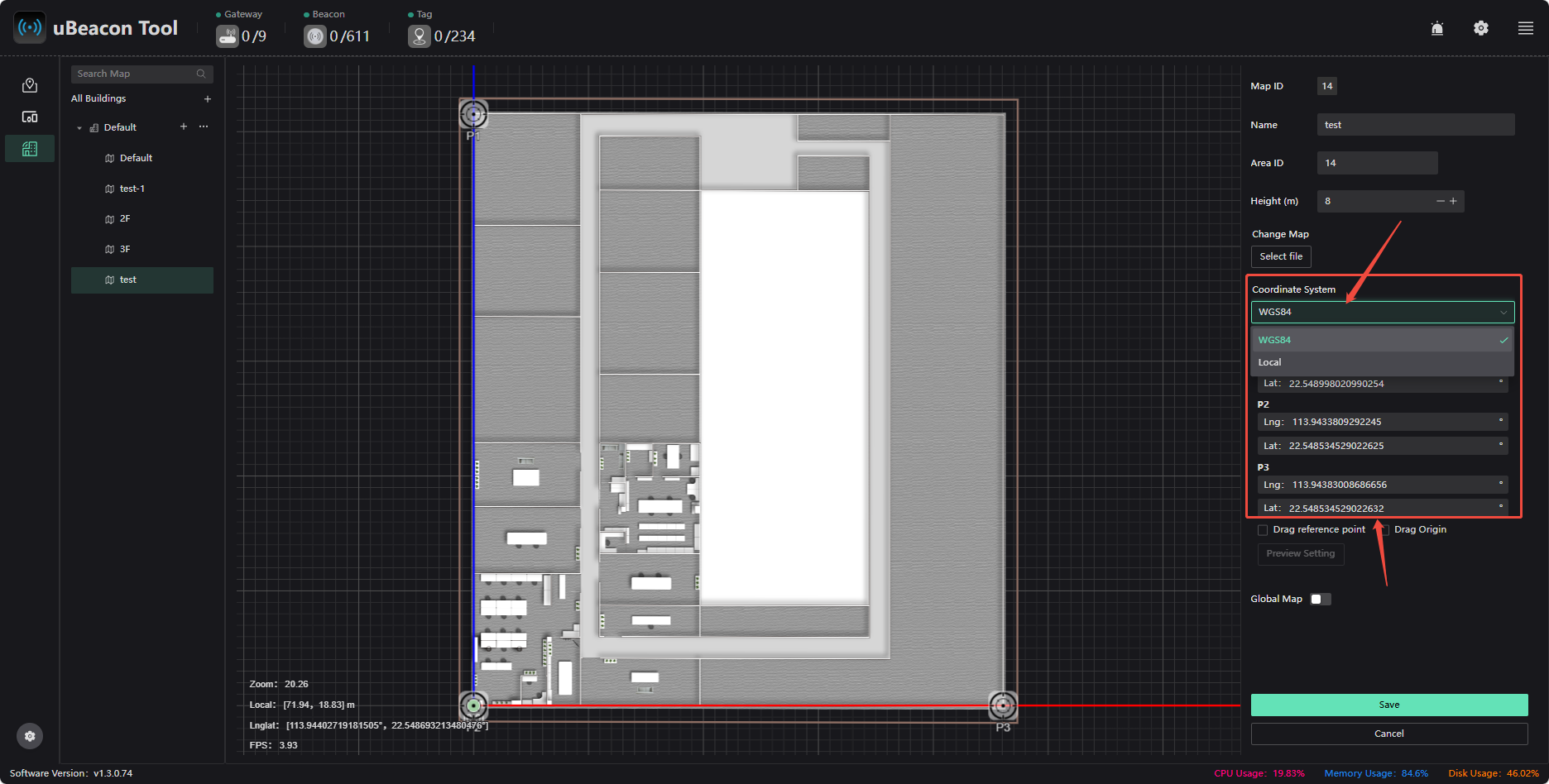
You can configure latitude and longitude settings to associate the local coordinate system of the indoor map with the WGS84 coordinate system. By entering three reference points—P1, P2, and P3—with known latitude and longitude values, the software can automatically establish a transformation relationship between the local coordinate system and the WGS84 coordinate system.
Steps for Configuring Latitude and Longitude:
- Select reference points: Choose three distinctive and easily identifiable locations on the indoor map as reference points (such as wall corners, columns, or access control centers). Ensure that these three points do not lie on the same line and that they cover the entire work area as much as possible to improve conversion accuracy.
- Measure Latitude and Longitude: Use a high-precision GPS receiver, total station, or known surveying data to obtain the precise latitude and longitude (WGS84 coordinate system) of these three reference points.
- Enter Latitude and Longitude Information: Select the “Manual Input” mode and enter the latitude and longitude information for the three reference points.
Coordinate Transformation: After saving the above settings, check the “Map Information” box to obtain the new transformation matrix information:
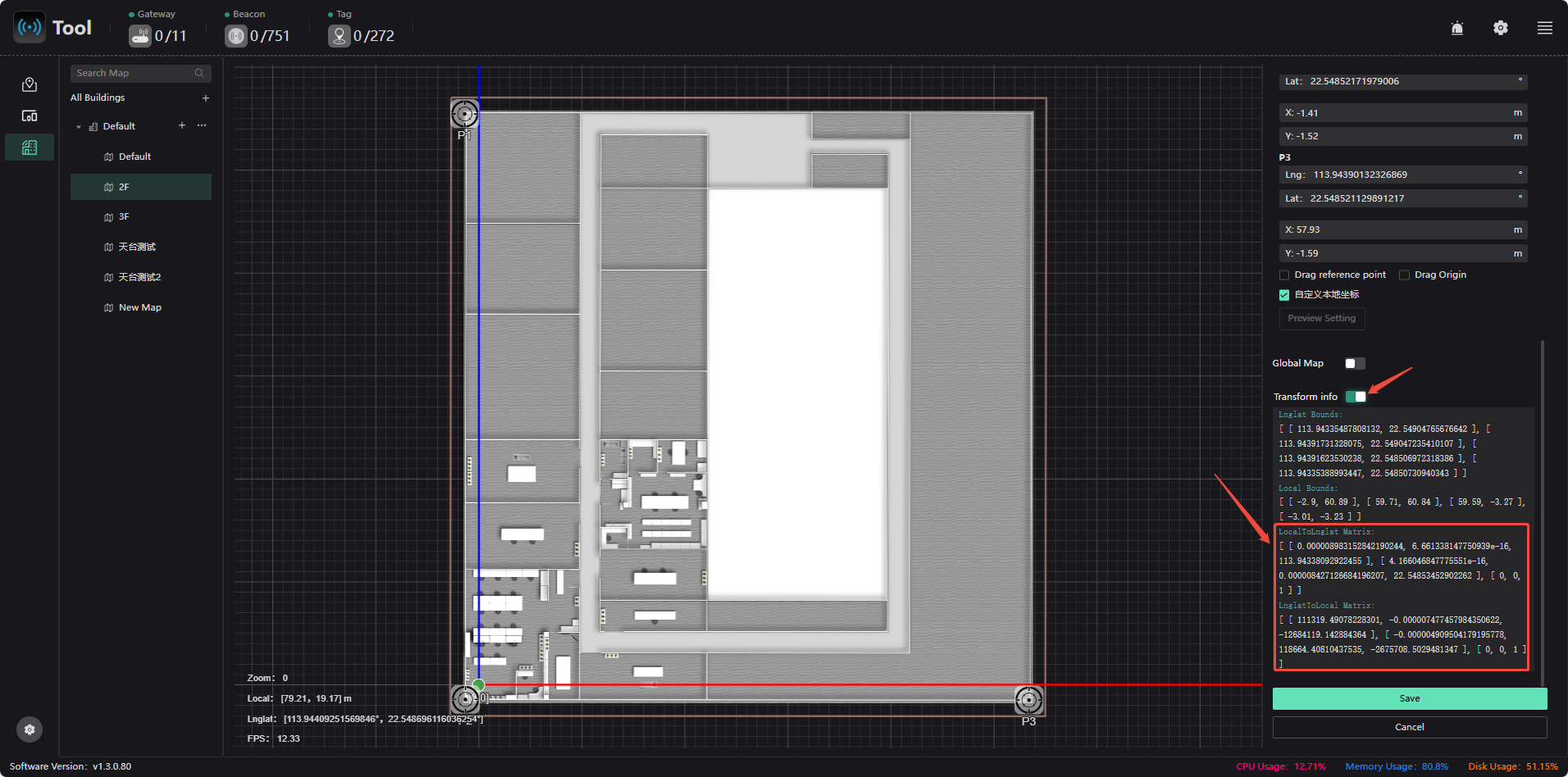
Coordinate transformation involves converting the local coordinates output by the label into latitude and longitude coordinates, which requires calculation using the coordinate transformation matrix. The transformation matrix, 【Local To Lnglat Matrix】, obtained in the first step is a 2 x 3 matrix; multiplying the local coordinates by this matrix yields the transformed latitude and longitude coordinates. The calculation method is as follows:
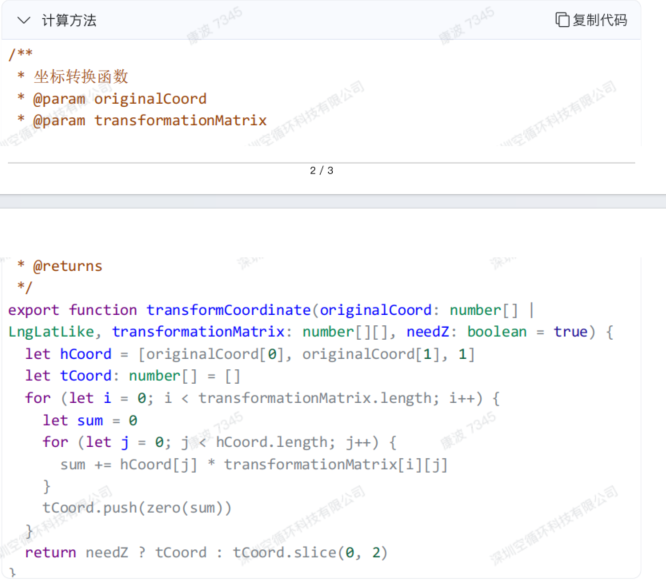
Calculation of the transformation matrix:
● Place the three origin points [x, y] into a 3×3 matrix (each column represents the x and y coordinates of a point) [x, y, 1];
● Similarly, place the three target points into a 3×3 matrix;
● Compute the inverse of the originMat matrix to obtain invOriginMat;
● Multiply invOriginMat by targetMat to obtain the final transformation matrix M
